




")











Tens of millions of people worldwide affected by infertility due to fallopian tube obstruction may soon benefit from a tiny robotic screw capable of clearing the pathway.
Researchers at the Shenzhen Institutes of Advanced Technology (SIAT) developed the innovative solution using a magnetically driven robotic microscrew to treat fallopian tube blockages.
“This new technology offers a potentially less invasive alternative to the traditional surgical methods currently used to clear tubal obstructions—which often involve the use of conventional catheters and guidewires,” said author Haifeng Xu in the study published in AIP Advances.
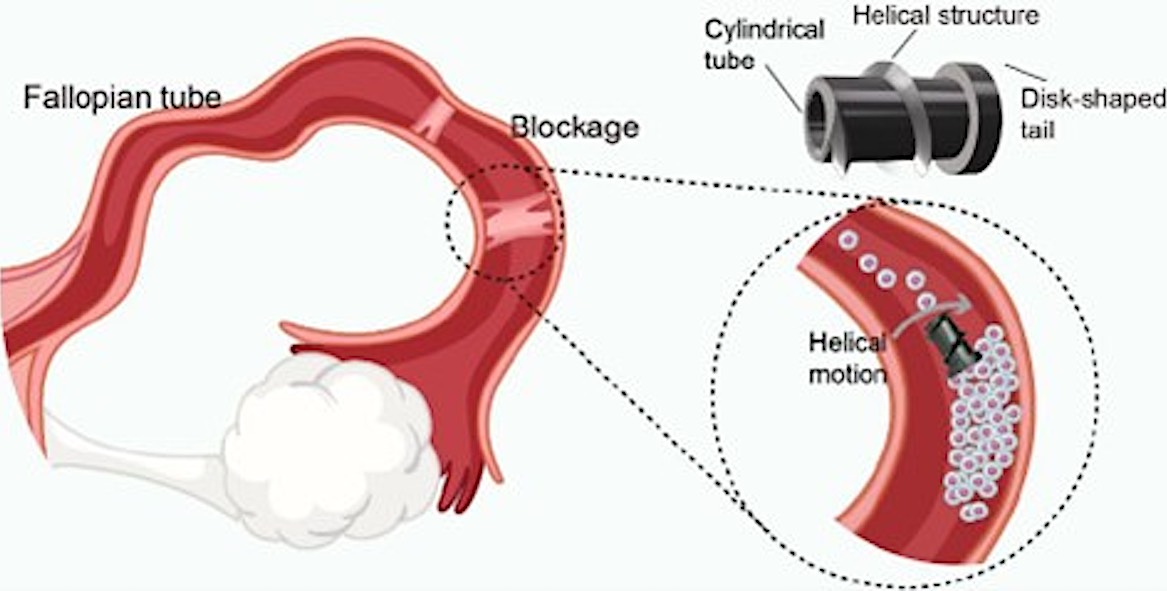
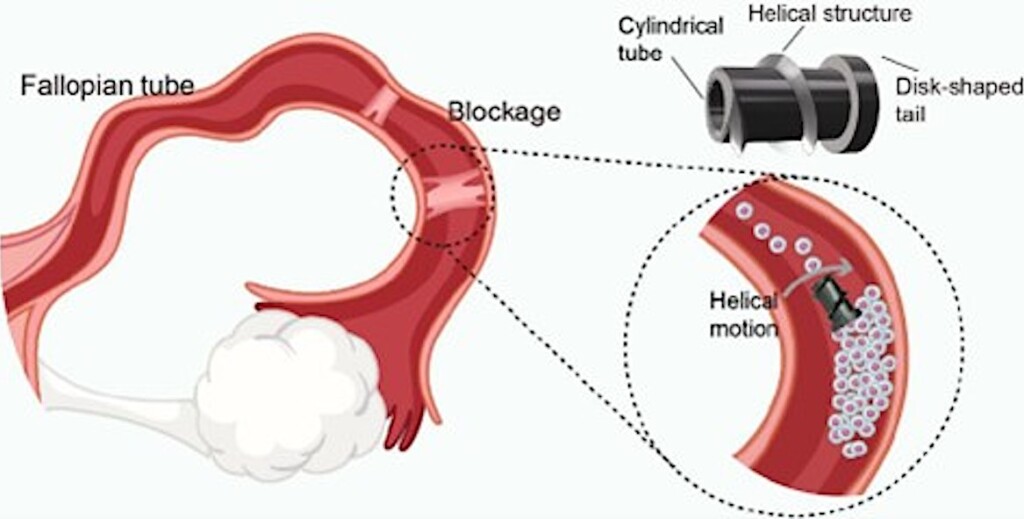
The microrobot is made from nonmagnetic photosensitive resin, coated with a thin iron layer to give it magnetic properties. By applying an external magnetic field, the robot rotates, generating translational motion that enables it to navigate through a glass channel made to simulate a fallopian tube.
The robot successfully clears the cell cluster obstruction placed in the channel, mimicking a typical blockage in the female reproductive system. This magnetic control provides precise navigation through the delicate and narrow structures of the fallopian tube.
The design of the microrobot is another key innovation for the team working in SIAT’s Magnetic Soft Microrobots Lab. It has a screw-shaped body with a helical structure, a cylindrical central tube, and a disk-shaped tail.
The helix-shaped structure is crucial for propulsion, while the disk-shaped tail helps stabilize the robot’s motion. As the screw rotates, it generates a vortex field that helps push fragmented debris toward the tail, clearing the blockage more effectively.
In tests, the microrobot demonstrated both effectiveness and efficiency in clearing the simulated blockage, with the vortex created by the rotating screw propelling debris away from the obstruction.
Looking to the future, the research team plans to make the microrobot smaller and more advanced. They also aim to test the robot in isolated organ models and incorporate in vivo imaging systems to track the microrobot’s movement and position in real time.
The team also envisions expanding the robot’s applications in surgery, including automatic control systems that could enhance the efficiency of blockage removal and other medical procedures.
AMAZING BODY: First Remarkable Mapping of Limb Development Shows Stages of Creating the Human Hand Masterpiece
“The ultimate goal is to provide a more effective, minimally invasive solution for patients suffering from infertility,” said Xu.
SHARE THE AMAZING INNOVATION On Social Media…